
一樣又不一樣的彩虹賽道
「不做伸手黨」是一種價值觀

如果我沒記錯的話,彩虹賽道這個功能是 kumar 最先提出的,然後我花了快兩天的時間實作。那時候,GPT 還不夠強大,要做一個穩定又高效的功能,對我來說難度不小。
這個功能在 dp 實作後,意外地受到了不少關注(沒人覺得太花了?)。
現在不少常用的 fork 也加入了這個功能,我們就來看看它們在速度上的差異吧:
以下測試只修改 ModelRenderer::drawPath 部分,並且只在該 func 測試效能
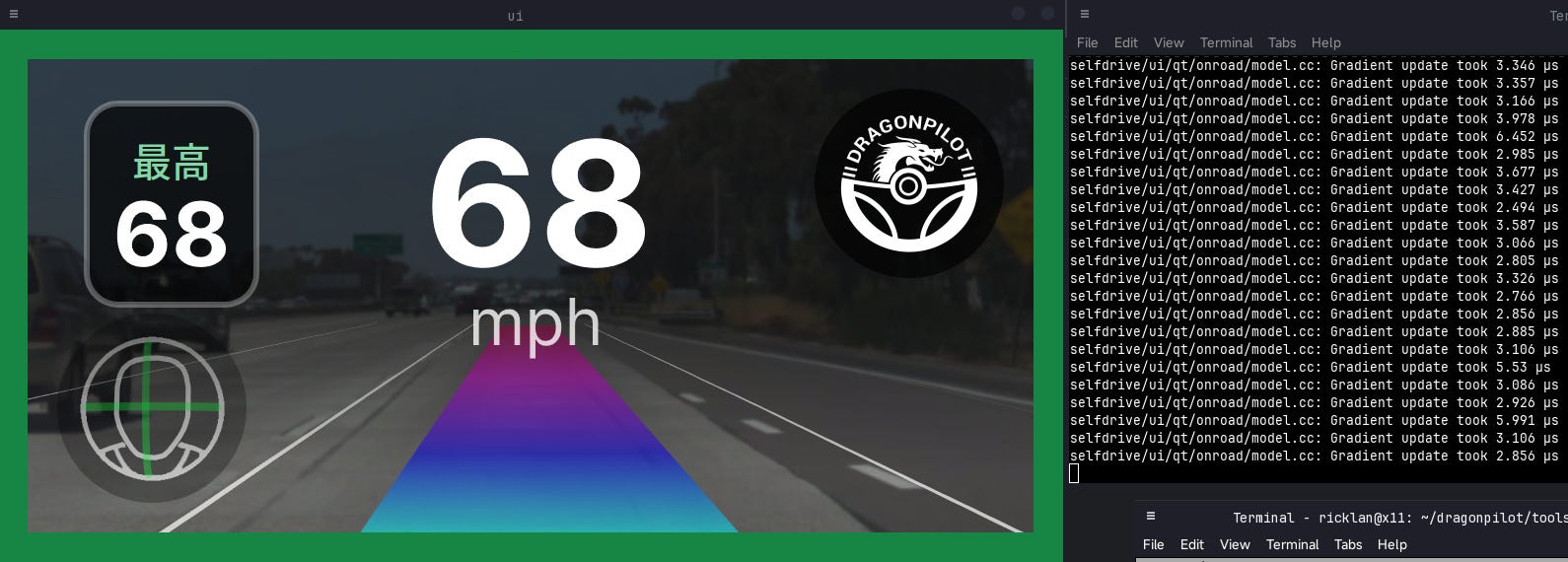
op 的速度 (baseline):
dp (pre-build) 的速度:
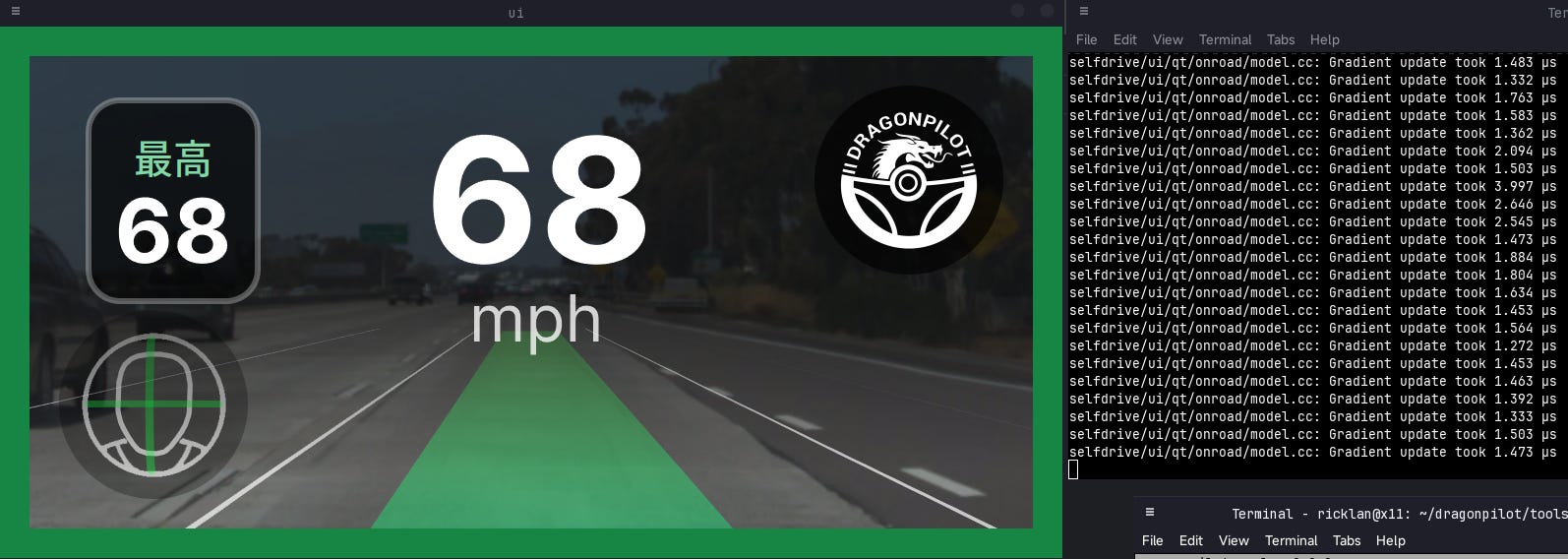
fork A 的速度:

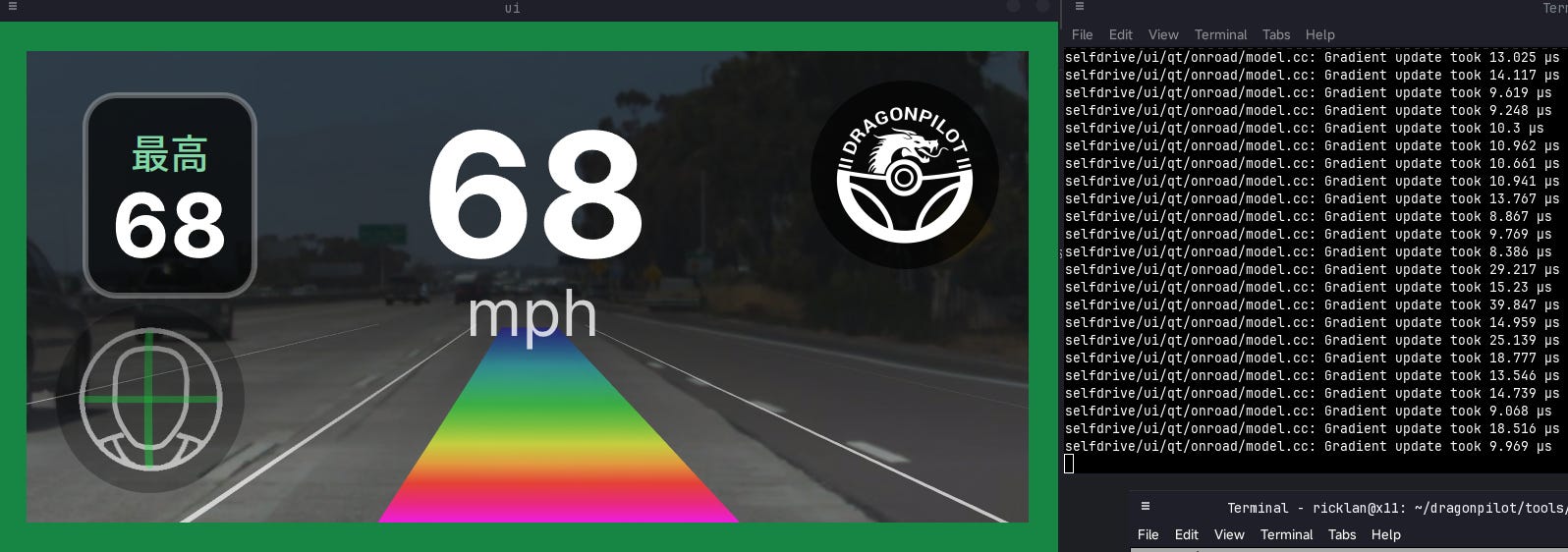
fork B 的速度:
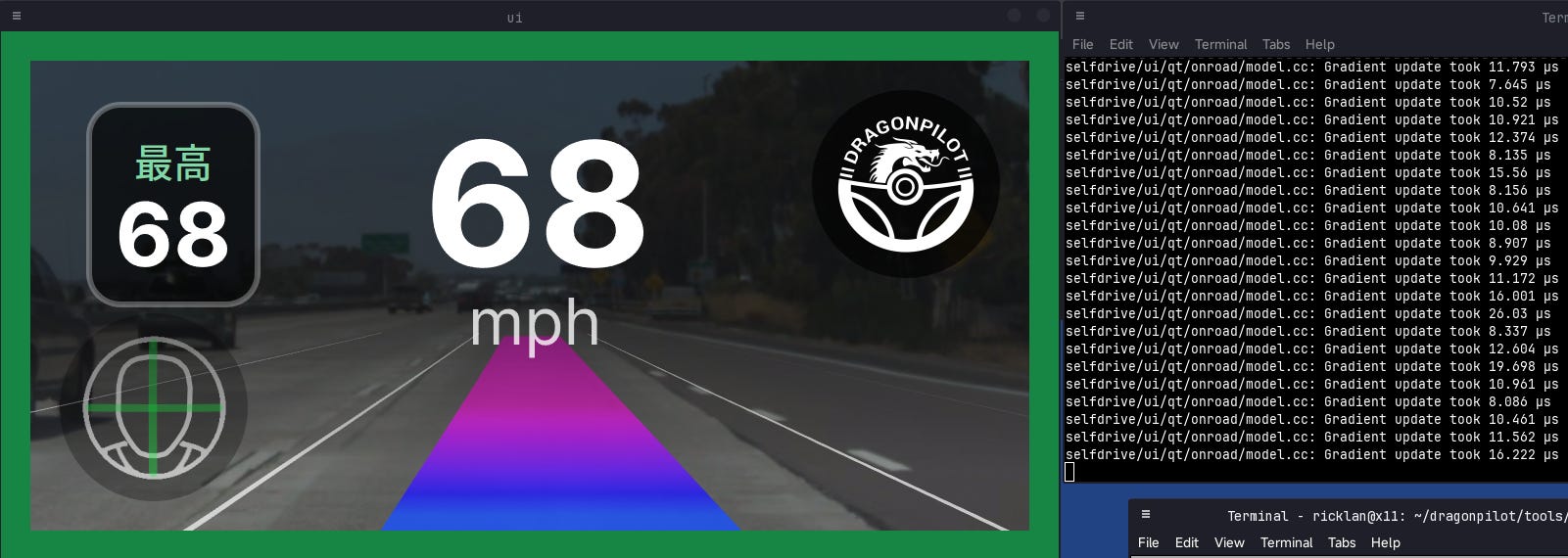
到今天才發現,原來我最早寫的版本 (用於 beta3 / d2) 速度比 pre-build 的快:
comma.ai 是一支非常擅長資源優化的團隊,從他們在代碼中的精細優化可以看出,他們的目標是讓用戶能夠運行更大、更強的模型,並且在夏天也能穩定運行(不過熱)。
開發 OP fork 讓我深刻體會到,當資源有限時,除了功能和外觀,效能同樣不能被忽視。系統的流暢度和反應速度對實際使用至關重要,而這也是我一直以來追求的目標。
因此,dp 從早期的「海納百川」功能,逐步精簡至如今的幾個核心選項,實際上也正是基於這樣的考量:
openpilot 就是 L2 級別的 ADAS 駕駛輔助系統,專注於做好核心功能,才是最有效的做法。
希望各 fork 能夠不僅僅是「有功能就好」,更能深入了解每個功能的實作原理,並持續優化。能夠理解並做得比原來更好,才是共同進步的方向。共勉之。
我們盡量以最簡單易懂的方式說明,若有任何錯誤也麻煩各位指正。未經授權請勿任意轉發,轉發請註明出處,謝謝。