
淺談 Multi Lateral Planner 功能
原文於 2022年11月3日 發表

首先先謝謝大家的支持,我們的社群今天終於滿 1000 人啦!
雖然比一些動輒 5000+ 的 op 社群還是弱了些,但我們還是希望能以技術分享交流為主,讓大家能從使用者的角度退回來理解其背後的技術,在使用起來才知道它的能力範圍、限制,這樣才更能去處理遇到的不同的狀況。
(例如:線燒了該怎麼拆? XD)
不廢話了,今天我們來聊一下新加的 Mutli Lateral Planner 功能
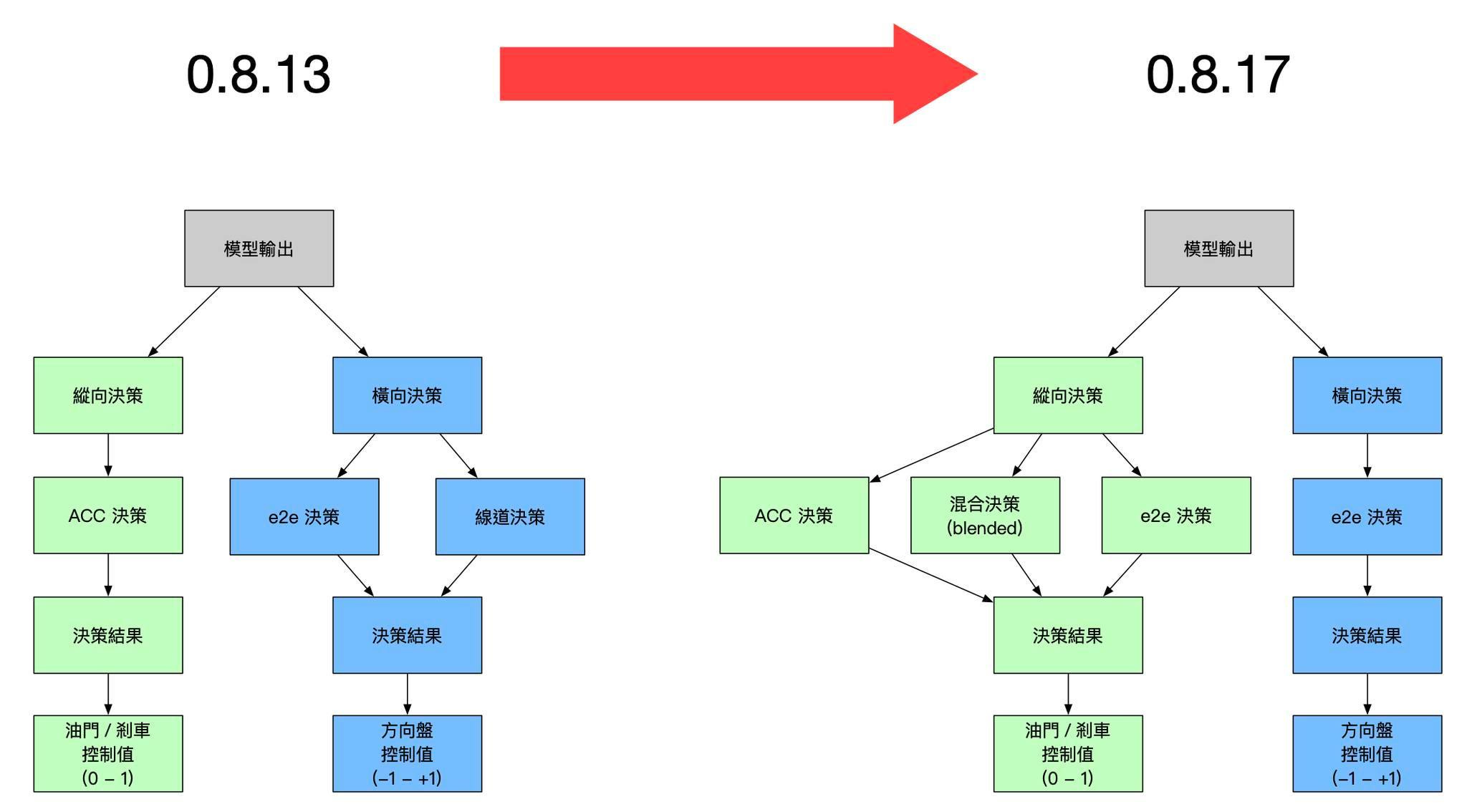
dp 在最新的版本加入了一個 Lateral Planner Version 的選項,讓車友們能夠使用舊版 (0.8.13 / 0.8.16) 的橫向決策。
首先我們要知道,comma.ai 一直朝所謂的 End-to-End 控制推進,簡單的來說,便是模型能夠從輸入的畫面裡直接輸出下幾秒該如何控制。
這樣的做法大大減少了人工介入定義控制規則的難度。
舉例來說,在未進入 End-to-End 之前,需要先用個假定的路寬 (3.7m) 推算路線的中心位置。但是,每個國家的法定路寬不同、高速路段和鄉間小道的路寬也不同,最後只能用一系列的算法動態算出最接近的中心位置。
這只是能讓車子在有左右線道下置中而已,假如左線道消失了怎麼辦?兩邊都沒有線道了又怎麼辦?這些都需要人工去定義。
到了 End-to-End 就是另一個境界了,其實就像我們人在開車一樣,開久了你自然會知道該怎麼開,左右都沒有線時會自然靠中/右,路況複雜時自然會跟著前車走,彎道太彎時就切直線等等。
可惜的是,並不是所有人的都喜歡 End-to-End 的模式,因為模仿人類開車的習慣,反而讓人感覺它的置中能力下降了,時不時的壓線反而讓人覺得不穩。
聽到許多車友的反應後 (也是他們不願意離開 0.8.13 的理由之一),我們便在想,將舊版的決策放進來是不是就能解決這問題。
在幾周的嘗試發現效果還不錯後,我們終於將這個功能發佈出來讓大家都能玩玩。
而為什麼有 LATEST (最新) / 0.8.13 / 0.8.16 這三個選項,理由很簡單:
0.8.13 - EON/C2 最後的官方版本。
0.8.16 - 移除橫向線道決策前的最後一個版本。
LATEST - 目前官方最新的版本。
如果有需求,未來我們也可以考慮推出 Multi Longitudinal Planner 功能。
(是不是代表就能用回 shane smiskol 的 dynamic follow 了? XD )
我們盡量以最簡單易懂的方式說明,若有任何錯誤也麻煩各位指正。
未經授權請勿任意轉發,轉發請註明出處,謝謝。