
模型選擇器? Tell me why?

最近,社群中有朋友建議:「可以新增一個『模型選擇器』嗎?」
這是一個很棒的想法,我自己也曾深入思考過。然而,在經過審慎的技術評估後,dragonpilot 目前的答案依然是:不會加這個功能。
這篇文章的目的,就是想和大家分享這背後的技術考量,這關乎系統的穩定性、駕駛體驗的一致性,以及長期的維護複雜度。

核心問題:模型與控制的「耦合程度」
一個常見的觀點是,openpilot 的駕駛模型(.onnx 檔案)就像一個可以隨意更換的「大腦」。但事實上,模型 (modeld) 與其下游的控制模組 (controls) 之間,並不是完全解耦的,而是存在不同層次的耦合關係。
更貼切的比喻是:它們是「大腦」與「神經系統」,透過一套「溝通語言」交換訊息。這套語言,就是模型輸出的 schema 與其對應的語意 (semantics)。
當模型僅僅更新權重,輸出 schema 與語意保持一致時:controls 不需要任何改動,舊版或新版模型可以互換,差別只在於駕駛效果(例如車道檢測更穩定或路徑預測更平順)。
當模型更新時輸出 schema 或語意改變:controls 就必須同步更新,才能正確解讀新訊息。否則可能會產生 jerk 或「騎馬感」,甚至無法正常運作。
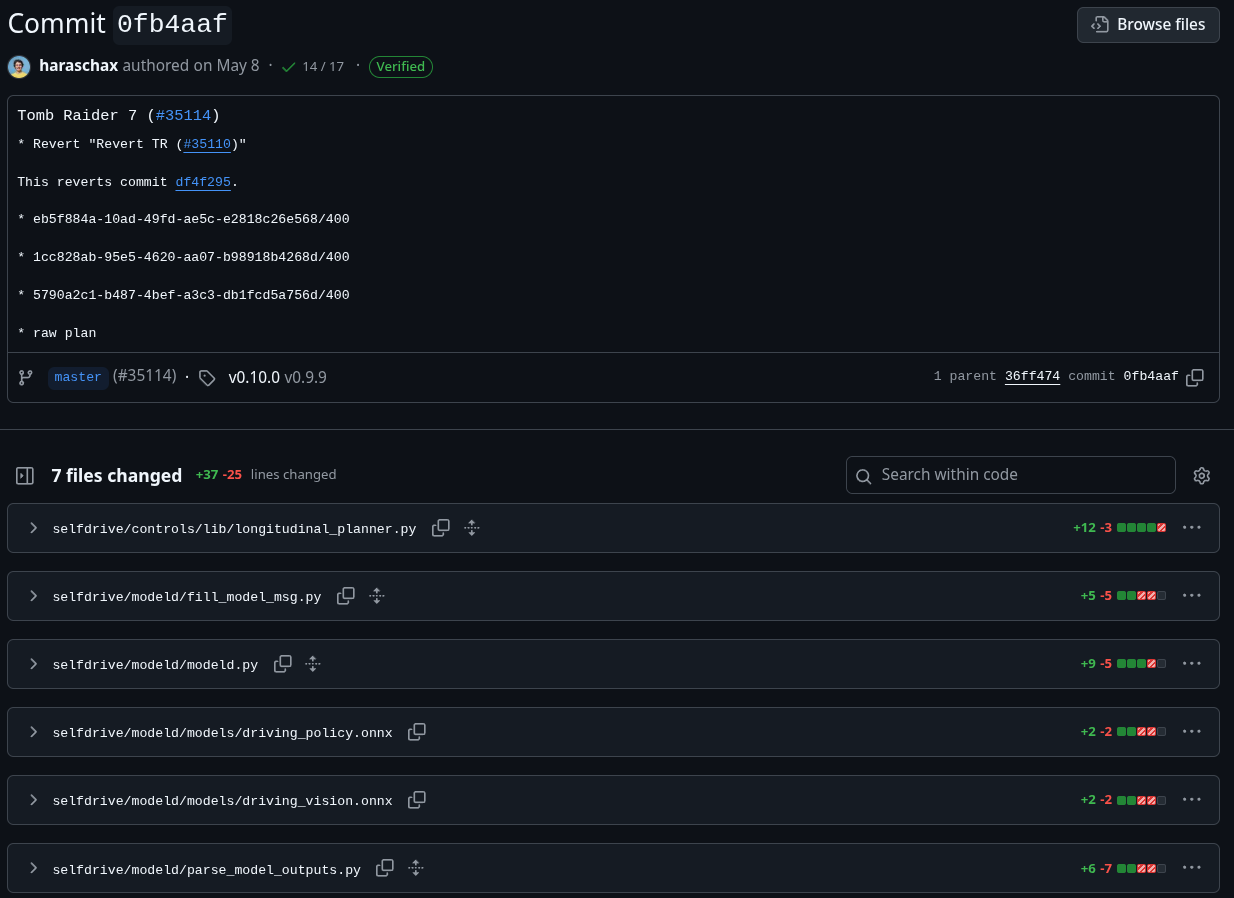
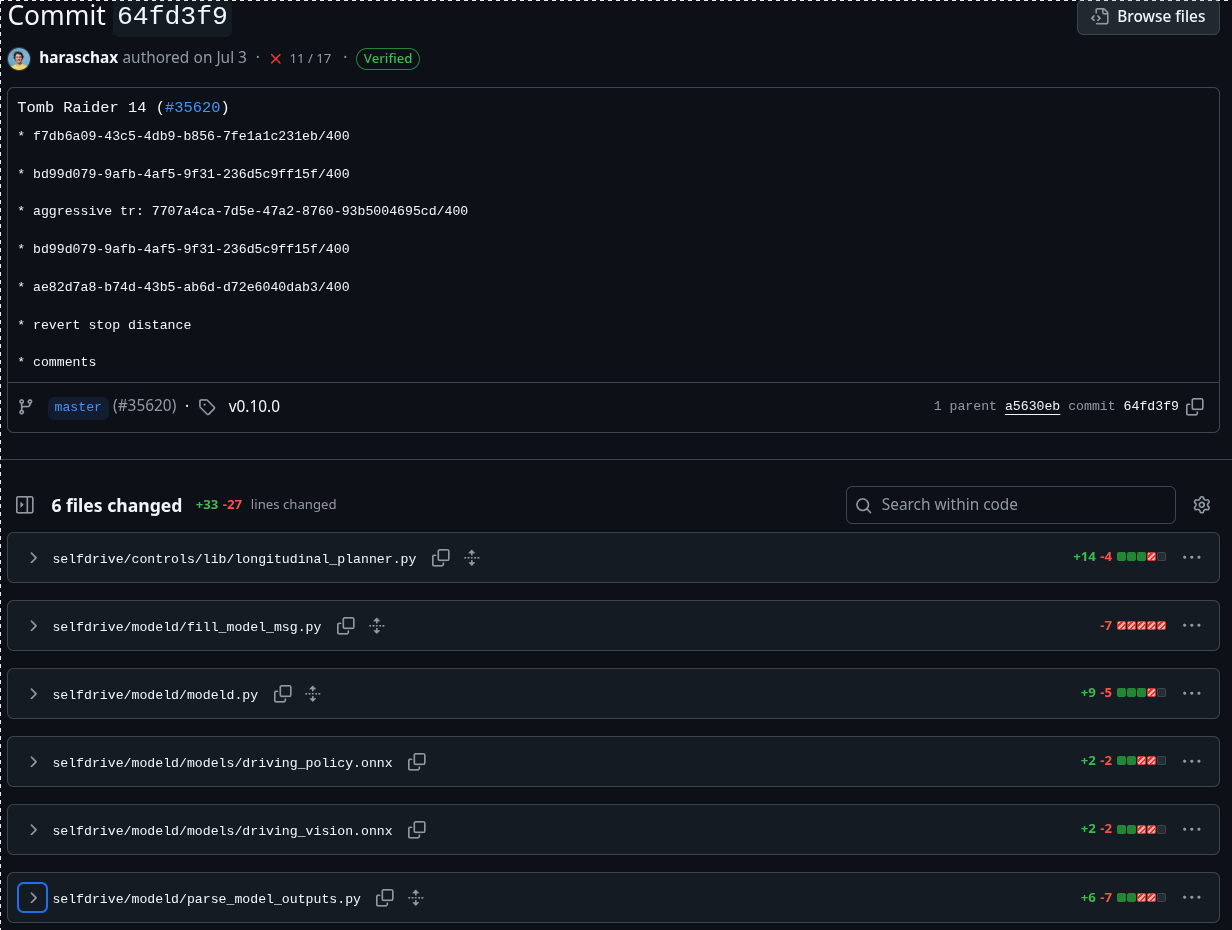
過去的例子像 Tomb Raider 7、Tomb Raider 14,模型更新時也同時更新了 Longitudinal Planner,這就是因為輸出語意有改變。換句話說,這種情況下,模型與控制是「強耦合」的。

「混搭」為何不是最佳解?
確實,有些 fork 提供了模型選擇器。這的確能在 schema 沒有變 的情況下正常使用,但並沒有解決耦合的根本問題:
使用者若不小心混用「舊 controls + 新 schema 模型」或反過來,體驗會不一致,甚至造成不穩定。
測試組合會呈現 N 個模型 × M 個 controls 的龐大矩陣,大幅增加維護與驗證的成本。
這也是為什麼我們認為,與其給使用者一個「表面的自由」,不如維持官方的版本一致性,來確保可預測性與穩定性。

正確的做法(以及為何它如此困難)
如果我們真的要打造一個最正確、最安全的「模型選擇器」,它該是什麼樣子?
答案是:它必須像一個時光機。 切換模型時,必須完整地還原當時與之配套的 modeld 和 controls 模組,才能確保系統的一致性。
舉個最實際的例子:如果一個好的切換器能做到這點,那麼受「騎馬感」所苦的 SDSU 使用者,就應該能直接切換回 openpilot 0.9.7 (North Dakota Model) 的完整「模型 + 控制」組合包,從而根本性地解決問題。
那想體驗最新模型該怎麼辦?
讀到這裡,你可能會想:「我理解耦合的風險了,但我就是想走在最前線,體驗最新的模型,並為社群做出貢獻,該怎麼辦?」
答案很簡單:直接安裝最新的 openpilot master 分支。
這才是最正確、最純粹的體驗方式。因為你的駕駛體驗不會被任何 fork 維護者的客製化調校所影響,而你回報給 openpilot 官方團隊的數據與問題,才最具參考價值,能真正幫助 openpilot 進步。
dragonpilot 的目標是提供穩定可靠的方案,而 openpilot master 分支則是為開發與實驗而生。選擇最適合你的路,才是最好的方案。

結語:穩定,才能 Chill
openpilot 的核心理念與標語是「make driving chill」。一個需要使用者時時擔心模型是否匹配、體驗是否降級、甚至花時間去研究哪個組合才是最佳解的系統,一點也不 chill。
dragonpilot 堅持不加入「模型選擇器」,正是基於這個理念。
我們深知 openpilot 雖然有時候模型和控制是鬆耦合的,但在許多關鍵更新中仍然是緊密耦合的。唯有透過完整的版本驗證,才能確保系統的每一個部分都能和諧運作。
✍️ 本文在 gemini 協力下完成,一起調校的不只是 openpilot,還有這篇文章。
我們盡量以最簡單易懂的方式說明,若有任何錯誤也麻煩各位指正。未經授權請勿任意轉發,轉發請註明出處,謝謝。